
【EVracing.jp】技術コラム モータの制御方式について
前回はまだパワーエレクトロニクスの技術が確立されていない時の、モータの制御方式についてお話しました。第4回はパワーエレクトロニクスの技術によるモータの制御方式についてお話したいと思います。
前回お話した抵抗制御方式は、モータの回転数を落とすためにモータと直列に抵抗を入れて、モータの端子間にかかる電圧を落としていましたが、欠点として抵抗での熱損失が大きいということをお話しました。
そこで考えられた方式がスイッチングによるチョッパ制御方式です。言葉の通りON-OFFをして電圧を切り刻むようにスイッチングを繰り返す動作をします。スイッチング動作の簡単な動作図を下図に示します。
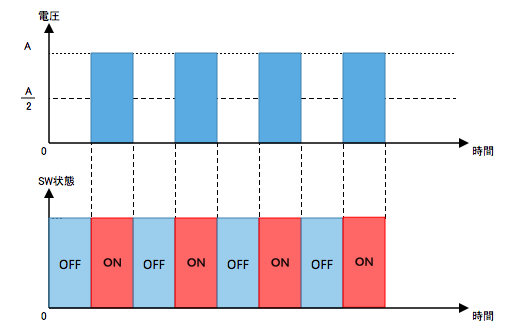
上図のように、SWをON-OFFさせてAの電圧または0の電圧の状態を作ります。最終的な出力電圧はON時間とOFF時間の比率から決まり、例えばON時間とOFF時間の比率が50:50の時は出力電圧はAの半分となります。またON時間とOFF時間の比率が25:75の時の出力電圧はAの4分の1となります。出力側にはモータのコイル等のインダクタ成分があるので、ONとOFFの比率で電圧は平均化されます。
しかし、この原理には大きな問題がありました。それは電力を出力する間、常にスイッチをON-OFFし続けなければならない(1秒間に数百から数千回)ということです。通常の物理接点のスイッチでは、すぐに耐久回数を超えてしまい、まったく量産品としては使いものになりません。そこで登場したのが半導体素子です。
はじめに登場にしたのが、サイリスタという半導体素子です。このサイリスタは、無接点でスイッチングを行うことができ(1秒間に数百回)、この素子を用いることによりチョッパ制御が実現され、モータを動かす制御回路での損失は大きく減ることになりました。
さらに、このチョッパ制御の誕生により、減速時に今まで運動エネルギーを熱エネルギーに変換して減速していたのが運動エネルギーを電気エネルギーに変換して回生することが可能になりました。次回はこの回生ブレーキについてお話したいと思います。













